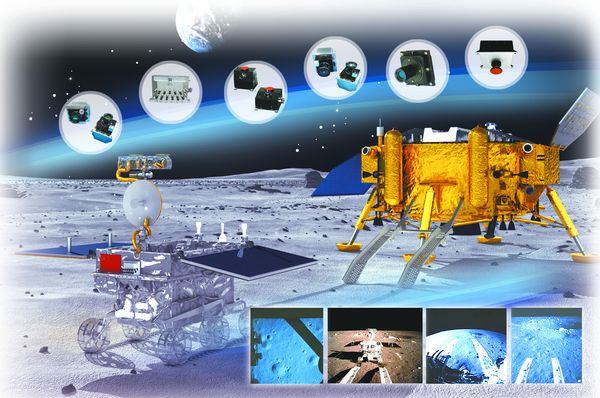
丁洁 制图 神舟传媒 供图 12月14日,继嫦娥三号探测器成功实现月面软着陆之后,玉兔号月球车开始了月球巡视任务。落月阶段,嫦娥怎样找准安全降落位置?着陆区地形地貌和两器分离过程如何向“地球人”展示?巡视阶段,玉兔在“广寒宫”闲庭信步是怎么做到的?在这些过程背后,由中国航天科技集团公司五院研制的嫦娥三号相机“家族”,功不可没。 “摄影记者”随嫦娥奔月 此次嫦娥奔月,随行的还有四位“摄影记者”——嫦娥三号着陆器上安装了一台降落相机和三台监视相机,共四台微小相机。伴随着“咔咔咔”的快门声,它们为38万公里之外的地球观众发回了神秘而又极具视觉冲击力的探月“大片”。 四位“摄影记者”三年前就曾在嫦娥二号之旅中,出色完成了记录飞行器活动瞬间和月表信息的任务,获取的快视图像景物清晰、层次分明、色彩明快,使我国首次实现了卫星的工程可视化遥测。在嫦娥二号的拓展任务中,“摄影记者”更是在与距地球700万公里之遥的小行星“图塔蒂斯”擦肩而过的瞬间,成功获取其图像。这是人类第一次近距离观察“图塔蒂斯”。 着陆器降落时,降落相机可以获取着陆区域的光学图像,用于分析着陆区月表的地形地貌和区域地质情况,从而辅助其他载荷进行科学探测。降落相机拍摄的是灰度图像,采用高速静态灰度压缩技术,压缩算法占用系统资源少,满足工程需要,很好地体现了微小相机轻小型、低功耗的优势。 嫦娥二号任务中,降落相机是在距离月球15公里的高度拍摄月表图片,对着陆器软着陆进行先期技术验证,为嫦娥三号探路。而这次,降落相机终于得以在距月球2公里~4米的范围内的各个高度由远及近地为月球拍摄“特写”,成为我国第一台近距离拍摄地外天体的相机。 近月拍“特写”意味着什么?“降落相机的最大分辨率可达毫米级,在距月球2公里处能拍清汽车大小的物体,4米处甚至能拍清小四号字大小的物体。”嫦娥三号微小相机技术人员形象地比喻说。 待嫦娥三号探测器着陆后,三台被命名为A、B、C的监视相机就开始了各自的工作。安装于着陆器上部的A、B相机分别负责监测两器解锁和判断巡视器移动至转移机构是否到位;位于前端的C相机成像距离为1米~20米,要记录下巡视器驶离转移机构抵达月面的关键过程,监视其近距离月面活动状况,兼顾拍摄月面地貌状态。三台相机不仅接力完成对探测器两器释放分离这一月表活动的展示任务,同时还为过程中每一个指令的执行情况提供直观视觉信息,并为下一指令的执行风险提供评估基础。 与地球上目前媒体对全能型记者的要求一样,作为月球“摄影记者”的监视相机,拍摄的不仅是图像表现力更强的彩色图像,根据任务需求它们还具有静态和动态两种成像选择——对于非运动目标,优先选用静态摄影模式;对于运动目标,则使用动态摄像模式。同时,它们还具有自动曝光和指令曝光功能,可满足执行任务期间任意光线条件的成像需求。 月宫上演“你是我的眼” 此次帮助嫦娥三号探测器落月、巡月的相机“家族”中,还有几位特殊成员——它们被归在相机的行列里,却不像上述四位“摄影记者”一样,拍出照片供地面应用。“这些相机拍的图像需要实时传给控制计算机。对于控制系统来说,它们是敏感器,而不是有效载荷。所以,将它们称为玉兔控制系统的‘眼睛’更为贴切。”该设备的研制负责人王力解释说。 “成员”之一的月面着陆地形敏感器,又称光学成像敏感器,是安装在着陆器上的“眼睛”。落月时,嫦娥在接近段大约400米~600米的高度,利用这一“眼睛”进行粗避障,即对月球表面成像,通过进行阴影、亮暗、灰度起伏等图像处理和模式识别,模拟人眼视觉,辅助GNC分系统完成障碍规避,找到一个较大的安全着陆范围。之后,探测器还会利用激光三维成像敏感器在悬停段约100米处进行精避障,更加精确地找到一个正确的位置,最终实现安全区软着陆。 探测器从粗避障到着陆整个过程大约只有1分钟的时间。如果相机将拍摄图像传回地面,再做反应,肯定会错失良机。着陆器GNC分系统主任设计师梁俊说,正是因为“眼睛”的存在,才使得探测器能够及时自动控制处理判断哪里是障碍点,哪里是安全点。目前,这种先粗避障再精避障的智能障碍识别方法,是国际航天领域的首次接力避障,已由五院申请了专利。 玉兔也经中国航天人“点睛”,“长”有两双“眼睛”——一对导航相机安装在巡视器的桅杆上,用于获得约10米范围的月面地形信息,为巡视器规划路径方向;一对避障相机固定安装在巡视器前端,使用鱼眼170度大视场镜头获取月面立体图像,辅助GNC分系统自主完成3米以内的近距离障碍规避。 相较于光学成像敏感器,这两双“眼睛”因为应用了国内首台双目视觉在轨三维恢复系统,而更接近人眼。“该系统可以把左右两个镜头‘看’到的二维地形信息,经过一系列的处理与运算恢复成三维坐标信息。”巡视器GNC分系统技术人员介绍说,如此一来,玉兔就能知道前方哪里有石块,哪里有坑洼,根据实际地形情况自行作出决策,灵巧地躲避危险。 如果说避障相机是嫦娥的眼睛,那么由五院研制、被玉兔号怀揣在“腹部”的激光点阵器,就是在一片漆黑中保证“眼睛”看清方向的探路灯。玉兔号不但在阳光下“看”得清晰,在阴影里也能准确地辨别障碍。当月球车进入紧急激光探测避障移动模式时,激光点阵器会向前方发射出按一定规律分布的近红外激光束,在月表形成规定图样的光斑方阵,然后“搭档”避障相机对光斑质量、强度进行采集和计算,计算的结果成为月球车前行的判断依据。 在“眼睛”处理图像的过程中,对于设计者来说,最大的难点要数对障碍的判别方法。在月面情况复杂的条件下,面对“眼睛”既要成像精确又要快速的要求,设计者不仅需要以若干标准来规定安全与否的情况,还需要用大量月面真实图片进行仿真,以使机器的识别能力越来越趋近于人眼。 “目前,嫦娥‘眼睛’的障碍识别准确率达90%以上,判别安全区域绝对没有问题。”梁俊告诉记者。(崔恩慧) |